

Ein neues KI-Modell könnte Abläufe in einem Roboterlager rationalisieren
Dem automatisierten Lagerhandling gehört die Zukunft: Roboter holen die Güter aus Regalen und leisten Unterstützung beim Kommissionieren. Wo aber Hunderte von Robotern durch Lager flitzen, kann es durchaus zu Verkehrsproblemen kommen. Forscher des Massachusetts Institute of Technology MIT haben sich diesem Problem gewidmet. Die Lösung liegt einmal mehr in der KI.






Schauplatz Lagerhalle, irgendwo auf der Welt: Roboter flitzen über den Boden und greifen Artikel, die sie dann an menschliche Mitarbeiter zur Verpackung und zum Versand übergeben. In vielen Branchen, vom E-Commerce bis zur Automobilproduktion, werden Lagerhäuser mit Hunderten von Robotern immer häufiger Teil der Lieferkette. Das Problem: Wenn 800 Roboter gleichzeitig unterwegs sind, um Waren effizient zu ihren Bestimmungsorten zu bringen, wächst die Gefahr von Kollisionen. Selbst die besten Algorithmen zur Wegfindung haben Schwierigkeiten, mit dem schnellen Tempo des elektronischen Handels oder der Produktion Schritt zu halten. Die Roboter sind in gewisser Weise wie Autos, die sich in einem überfüllten Stadtzentrum zurechtfinden müssen.
Intelligente Verkehrsplanung im Roboterlager
Eine Gruppe von MIT-Forschern setzt bereits heute KI ein, um Verkehrsstaus zu entschärfen. Sie haben Ideen aus diesem Bereich übernommen, um das Problem des Roboter-Verkehrs in Lagerhäusern anzugehen. Zu diesem Zweck haben sie ein Deep-Learning-Modell entwickelt, das wichtige Informationen über das Lagerhaus kodiert. Dazu gehören Informationen über Roboter, geplante Pfade, Aufgaben und Hindernisse. Mit Hilfe des Modells können Sie vorhersagen, welche Bereiche des Lagerhauses am besten entlastet werden sollten, um die Gesamteffizienz zu verbessern. Die Technik unterteilt die Lagerroboter in Gruppen, um sie schneller mit herkömmlichen Algorithmen zur Roboterkoordination zu entlasten. Dadurch können die Roboter fast viermal schneller entlastet werden als bei Verwendung einer starken Zufallssuchmethode. Konkret: Die neue neuronale Netzwerkarchitektur berücksichtigt kleinere Gruppen von Robotern gleichzeitig. In einem Lagerhaus mit 800 Robotern könnte das Netzwerk beispielsweise die Lagerhalle in kleinere Gruppen mit jeweils 40 Robotern unterteilen. Dann wird vorhergesagt, welche Gruppe das grösste Potenzial hat, die Gesamtlösung zu verbessern, wenn ein suchbasierter Solver verwendet wird, um den zurückzulegenden Weg der Roboter in dieser Gruppe zu koordinieren. In einem iterativen Prozess wählt der Gesamtalgorithmus die vielversprechendste Robotergruppe mit dem neuronalen Netz aus, entlastet die Gruppe mit dem suchbasierten Solver, wählt dann die nächste vielversprechende Gruppe mit dem neuronalen Netz aus und so weiter.
Berücksichtigung von Beziehungen
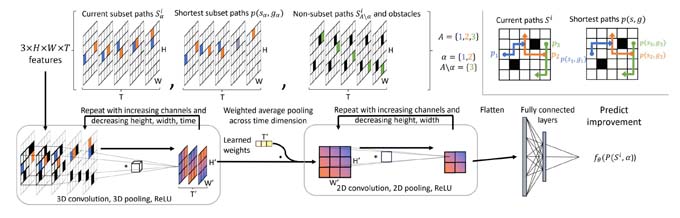
Darüber hinaus erfasst das neuronale Netzwerk die komplexen Beziehungen zwischen den einzelnen Robotern. Selbst wenn ein Roboter anfangs weit von einem anderen entfernt ist, können sich ihre Wege während der Fahrt durch das Roboterlager dennoch kreuzen. Die Technologie rationalisiert auch die Berechnung, da die Einschränkungen nur einmal kodiert werden müssen, anstatt den Prozess für jedes Teilproblem zu wiederholen. In einem Lagerhaus mit 800 Robotern können 40 Roboter entlastet werden, indem die anderen 760 als Nebenbedingungen festgelegt werden. Andere Ansätze erfordern, dass alle 800 Roboter in jeder Iteration pro Gruppe berücksichtigt werden. Stattdessen müssen die 800 Roboter in jeder Iteration nur einmal über alle Gruppen hinweg berücksichtigt werden. Dieser Deep-Learning-Ansatz könnte nicht nur bei der Rationalisierung von Lagerabläufen, sondern auch bei anderen komplexen Planungsaufgaben wie dem Design von Computerchips oder der Verlegung von Rohrleitungen in grossen Gebäuden eingesetzt werden.
„Wir haben eine neue Architektur für neuronale Netze entwickelt, die für Echtzeitoperationen in der Grössenordnung und Komplexität dieser Lagerhäuser geeignet ist. Sie ist in der Lage, Hunderte von Robotern in Bezug auf ihre Bahnen, ihren Ursprung, ihre Ziele und ihre Beziehungen zu anderen Robotern zu kodieren, und zwar auf eine effiziente Weise, bei der Berechnungen über Gruppen von Robotern hinweg wiederverwendet werden“, fasst Cathy Wu, Gilbert W. Winslow Career Development Assistant Professor in Civil and Environmental Engineering (CEE) und Mitglied des Laboratory for Information and Decision Systems (LIDS) sowie des Institute for Data, Systems, and Society (IDSS), zusammen. Cathy Wu ist Hauptautorin eines Artikels über diese Technik, und wird dabei von Zhongxia Yan, einer Doktorandin der Elektrotechnik und Informatik, unterstützt.
Quelle: techexplore.com


