

Un nuovo modello di AI potrebbe razionalizzare i processi in un magazzino robotizzato
Il futuro appartiene alla gestione automatizzata dei magazzini: i robot prelevano le merci dagli scaffali e assistono nell'evasione degli ordini. Ma quando centinaia di robot sfrecciano nei magazzini, possono sorgere problemi di traffico. I ricercatori del Massachusetts Institute of Technology MIT hanno affrontato questo problema. Ancora una volta, la soluzione sta nell'intelligenza artificiale.






La scena è un magazzino da qualche parte nel mondo: i robot si muovono sul pavimento e raccolgono gli articoli, che poi consegnano ai dipendenti umani per l'imballaggio e la spedizione. In molti settori, dall'e-commerce alla produzione automobilistica, i magazzini con centinaia di robot stanno diventando sempre più parte della catena di approvvigionamento. Il problema è che quando 800 robot viaggiano contemporaneamente per consegnare in modo efficiente le merci a destinazione, il rischio di collisioni aumenta. Anche i migliori algoritmi di individuazione dei percorsi faticano a tenere il passo con il ritmo veloce dell'e-commerce o della produzione. In un certo senso, i robot sono come le automobili che devono orientarsi in un centro città affollato.
Pianificazione intelligente del traffico nel magazzino robotizzato
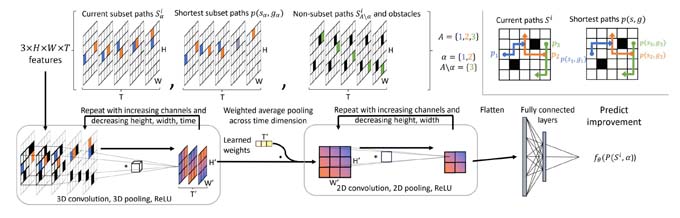
Un gruppo di ricercatori del MIT sta già utilizzando l'intelligenza artificiale per alleviare gli ingorghi stradali. Hanno adottato idee da questo campo per affrontare il problema del traffico di robot nei magazzini. A tal fine, hanno sviluppato un modello di apprendimento profondo che codifica informazioni importanti sul magazzino. Queste includono informazioni sui robot, sui percorsi pianificati, sui compiti e sugli ostacoli. Utilizzando il modello, è possibile prevedere quali aree del magazzino dovrebbero essere meglio scaricate per migliorare l'efficienza complessiva. La tecnica divide i robot del magazzino in gruppi per scaricarli più velocemente utilizzando gli algoritmi tradizionali di coordinamento dei robot. Di conseguenza, i robot possono essere scaricati quasi quattro volte più velocemente rispetto a quando si utilizza un metodo di ricerca casuale forte. In particolare, la nuova architettura della rete neurale considera gruppi più piccoli di robot contemporaneamente. In un magazzino con 800 robot, ad esempio, la rete può dividere il magazzino in gruppi più piccoli di 40 robot ciascuno. Quindi prevede quale gruppo ha il maggior potenziale di miglioramento della soluzione complessiva quando si utilizza un solutore basato sulla ricerca per coordinare il percorso che i robot di quel gruppo devono percorrere. In un processo iterativo, l'algoritmo complessivo seleziona il gruppo di robot più promettente con la rete neurale, scarica il gruppo con il solutore basato sulla ricerca, quindi seleziona il successivo gruppo promettente con la rete neurale e così via.
Considerazione delle relazioni
Inoltre, la rete neurale riconosce le complesse relazioni tra i singoli robot. Anche se un robot è inizialmente lontano da un altro, i loro percorsi possono comunque incrociarsi durante il viaggio attraverso il magazzino dei robot. La tecnologia semplifica anche il calcolo, poiché i vincoli devono essere codificati una sola volta, invece di ripetere il processo per ogni sottoproblema. In un magazzino con 800 robot, 40 robot possono essere sollevati impostando gli altri 760 come vincoli. Altri approcci richiedono che tutti gli 800 robot siano considerati in ogni iterazione per gruppo. Invece, gli 800 robot devono essere considerati solo una volta per tutti i gruppi in ogni iterazione. Questo approccio di deep learning potrebbe essere utilizzato non solo nella razionalizzazione dei processi di magazzino, ma anche in altre attività di pianificazione complesse, come la progettazione di chip per computer o la posa di tubature in grandi edifici.
"Abbiamo sviluppato una nuova architettura di rete neurale adatta alle operazioni in tempo reale alla scala e alla complessità di questi magazzini. È in grado di codificare centinaia di robot in termini di traiettorie, origini, destinazioni e relazioni con altri robot in un modo efficiente che riutilizza i calcoli tra gruppi di robot", riassume Cathy Wu, Gilbert W. Winslow Career Development Assistant Professor in Ingegneria civile e ambientale (CEE) e membro del Laboratory for Information and Decision Systems (LIDS) e dell'Institute for Data, Systems, and Society (IDSS). Cathy Wu è l'autrice principale di un articolo su questa tecnica ed è affiancata da Zhongxia Yan, dottoranda in ingegneria elettrica e informatica.
Fonte: techexplore.com


